Contourner un obstacle / retrouver la ligne
Contourner un obstacle / retrouver la ligne
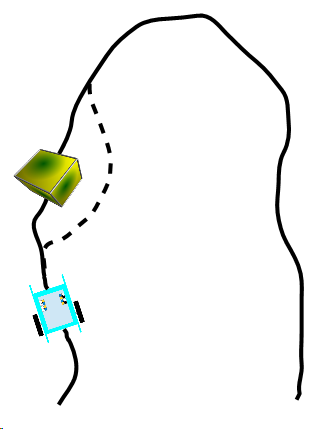
Le robot va devoir quitter la ligne pour contourner un obstacle (cube) avant de retrouver la ligne noire.
-
-
Travail préalable
Découper le travail du robot en étapes successives simples
Noter vos remarques dans votre cahier.
Faire appel au professeur pour valider.
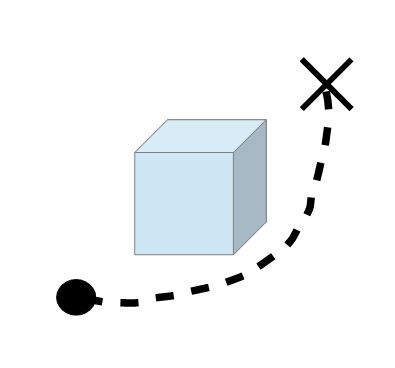
Etape 1 "contournement"
1 * Préparer un programme qui permet de contourner un obstacle.
Noter vos remarques dans votre cahier.
Enregistrer ce programme avec le nom "contournement" dans votre dossier d'équipe.
Faire appel au professeur pour valider.
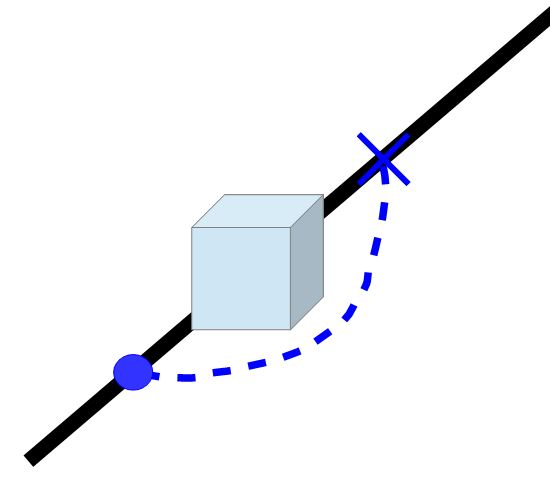
Etape 2 "retrouver ligne"
2 * En vous appuyant sur vos activités précédentes, modifier le programme pour que le robot s'arrête quand il retrouve la ligne noire.
Noter vos remarques dans votre cahier.
Enregistrer ce programme avec le nom "retrouver ligne" dans votre dossier d'équipe.
Faire appel au professeur pour valider.
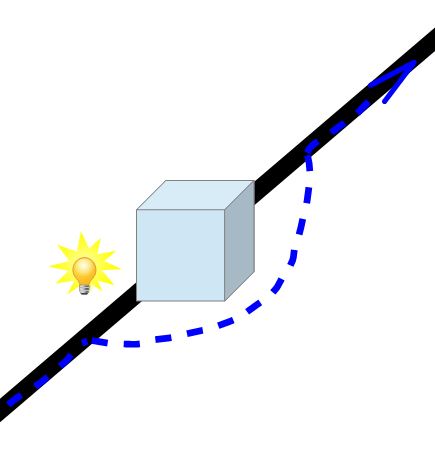
Etape 3 "Détection et contournement"
3 * Utiliser les exercices précédents pour préparer un programme qui permet au robot de suivre la ligne, de signaler par une pause et un signal lumineux quand il s'approche du cube avant de le contourner et de reprendre sa ligne....
Noter ce qu'il se passe dans votre cahier.
Enregistrer ce programme avec le nom "détection et contournement" dans votre dossier d'équipe.
Faire appel au professeur pour valider.
Project-Id-Version: eXeLearning 2.6Report-Msgid-Bugs-To: POT-Creation-Date: 2021-05-04 18:24+0200PO-Revision-Date: 2021-05-31 20:38+0200Last-Translator: Jesús Miguel Domínguez